

 联系我们
联系我们

焊接工件时,即使偏离示教焊接线,也可检测出示教点处的偏离量,并对各焊接线进行补正的功能。
工件精度不规则,或者工件装配的不规则等原因引起焊接开始点偏差的时候*适合使用。
 除上述以外,还有圆内径中心检测,圆外径中心检测,圆内径中心检测(带高度补正)的检测模式。
除上述以外,还有圆内径中心检测,圆外径中心检测,圆内径中心检测(带高度补正)的检测模式。
自动检测焊接开始点的偏差。工件自身不规则,或者将工件装配到工装时候的偏差等引起焊接开始点偏差的情况下,机器人自动检测焊接开始点开始进行焊接。
焊接开始点的检测时间大幅提高,通过运用高速始端检测功能,检测可在短时间内完成。(始端检测标准0.8m/min⇒高速始端检测4.5m/min)
注:高速始端检测的运用受限于机器人的机型
工件精度不规则,或者工件装配的不规则等原因引起焊接开始点偏差的时候*适合使用。
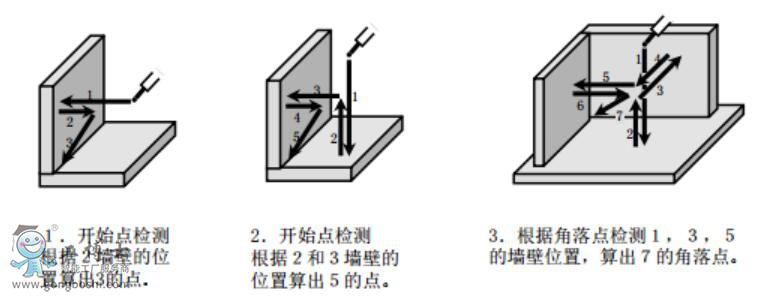
1.始端检测动作
1.只检一面 2.检测两面 3.隅点检测
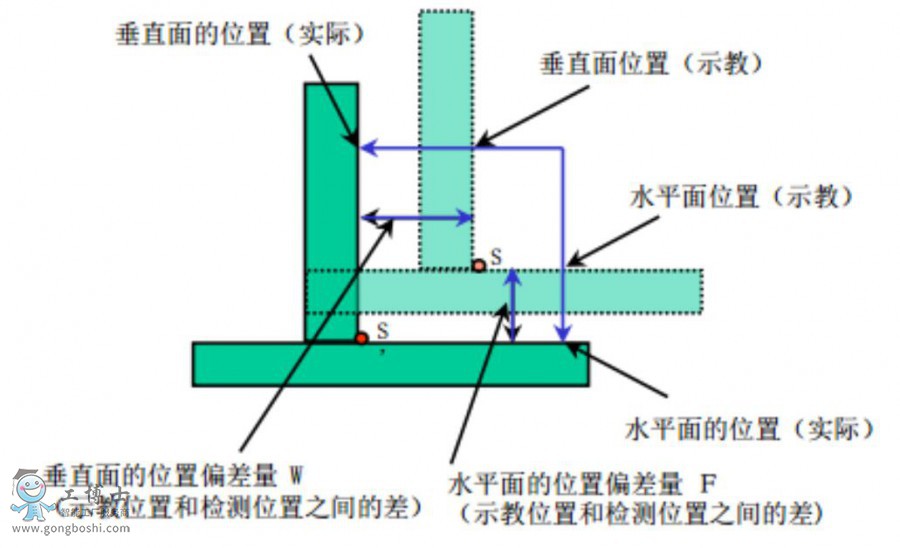
2.焊接开始位置的算法
下图中,水平面/垂直面的位置偏差量(F,W),求出焊接开始点位置S‘。
3.始端检出优点
自动检测焊接开始点的偏差。工件自身不规则,或者将工件装配到工装时候的偏差等引起焊接开始点偏差的情况下,机器人自动检测焊接开始点开始进行焊接。
焊接开始点的检测时间大幅提高,通过运用高速始端检测功能,检测可在短时间内完成。(始端检测标准0.8m/min⇒高速始端检测4.5m/min)
注:高速始端检测的运用受限于机器人的机型
本文摘自:网络 日期:2023-09-08
本公司还OTC欧地希机器人代理,具体供应的服务范围有: